在计算机视觉领域中,人脸检测或者物体检测一直是一个非常受关注的领域,而在人脸检测中,Viola-Jones人脸检测算法可以说是非常经典的一个算法,所有从事人脸检测研究的人,都会熟悉了解这个算法。Viola-Jones算法...

理论原理
33 条更新
在计算机视觉领域中,人脸检测或者物体检测一直是一个非常受关注的领域,而在人脸检测中,Viola-Jones人脸检测算法可以说是非常经典的一个算法,所有从事人脸检测研究的人,都会熟悉了解这个算法。Viola-Jones算法...

高性能传感器应用示例:HDL-32E激光雷达和Ladybug5全景相机
微信扫一扫 关注该公众号 前言 随着人工智能的快速发展,新技术革命不断驶来,世界已经进入智能化信息时代。在利用信息的过程中,首先要解决的就是如何获取准确可靠的信息,而传感器是获取自然和生产领域中...

近年来,随着工业机器人技术的成熟,工业机器人已被应用在越来越广泛的领域,其作业形式也日趋多样化。从工业机器人与作业对象的关系上来看,工业机器人的作业形式主要分为两类,一类是非接触式作业,如喷涂、焊...

移动机器人定位是确定其在未知环境中所处位置的过程,是实现移动机器人自动导航能力的关键。依据机器人所采用传感器类型的不同,其定位方式有所不同。目前应用较广泛的传感器有里程计、超声波、激光器、摄像机、红...
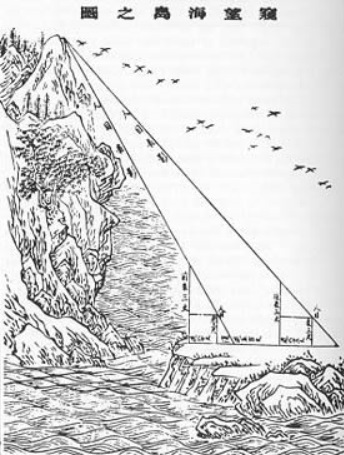
测距是估计两点连线长度的一项测量工作,它在许多科学与工程领域中都是最基本的任务之一。说到测距,人们通常会想到用量尺直接测定两点长度的“直接法”。用直接法测距,要求测量目标点是可达的。然而,...
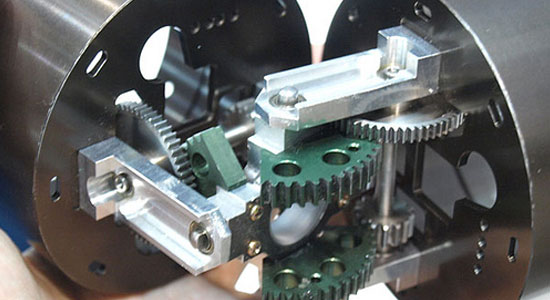
机器人连杆的运动来自于机器人关节驱动机构。一个机器人关节驱动机构至少包括三个组成部分:关节、驱动装置和传动装置。 关节是机器人连杆接合部位形成的运动副。对大多数机器人而言,关节只能是旋转式或者...

目前人工智能的主要学派有下列三家: (1) 符号主义(symbolicism),又称为逻辑主义、心理学派或计算机学派,其原理主要为物理符号系统(即符号操作系统)假设和有限合理性原理。 (2) 连接主义(connectio...
A*(A-star)算法是一种静态网路中求解最短路径最有效的直接搜索算法。在电子游戏中最主要的应用是寻找地图上两点间的最佳路线。在机器人领域中,A*算法常用于移动机器人路径规划。 为了便于理解,本文将以正...
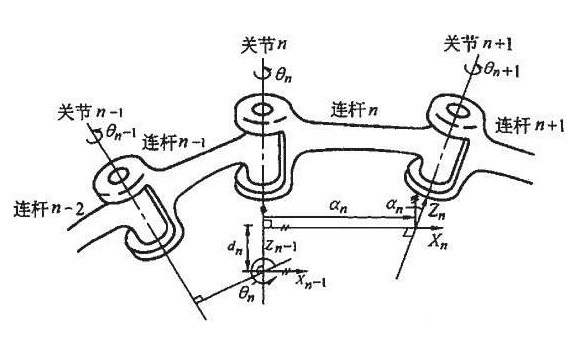
可以运动是机器人最基本的特征之一,很多机器人就是为了实现特定运动而被精心设计的。那么,什么是机器人运动学?机器人运动学是研究机器人各组成构件运动变换关系及运动特征参数的一门学科,它反映了机器人的运动...

机器人的分类是学习机器人技术之前必须了解的基本问题之一。机器人是个庞大的家族,现有的机器人分类方法和规则林林总总、莫衷一是,并不能将所有的机器人囊括其中。为使大家对机器人的类型有一个全面、系统地...