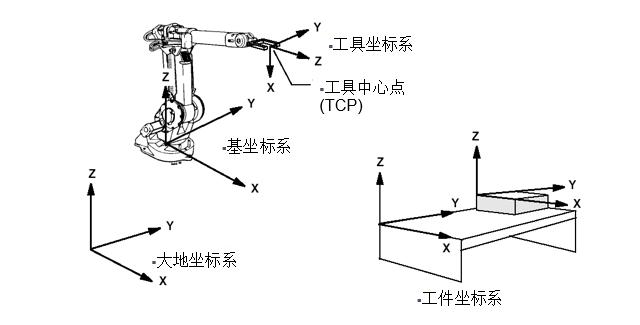
坐标系是为确定机器人的位置和姿态而在机器人或其他空间上设定的位姿指标系统。工业机器人上的坐标系包括六种:大地坐标系(World Coordinate System)、基坐标系(Base Coordinate System)、关节坐标系(Joint C...

科技
54 条更新
坐标系是为确定机器人的位置和姿态而在机器人或其他空间上设定的位姿指标系统。工业机器人上的坐标系包括六种:大地坐标系(World Coordinate System)、基坐标系(Base Coordinate System)、关节坐标系(Joint C...
A*(A-star)算法是一种静态网路中求解最短路径最有效的直接搜索算法。在电子游戏中最主要的应用是寻找地图上两点间的最佳路线。在机器人领域中,A*算法常用于移动机器人路径规划。 为了便于理解,本文将以正...

技术参数是不同工业机器人之间差距的直接表现形式,不同的机器人技术参数特点不同,对应了它们不同的应用范围。工业机器人是高精密的现代机械设备,参数众多,企业挑选工业机器人的时候应该着重注意哪些参数呢?下...
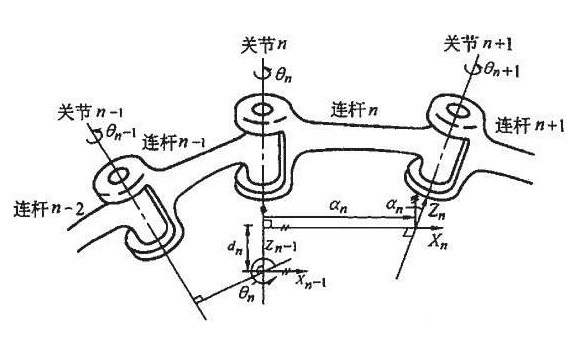
可以运动是机器人最基本的特征之一,很多机器人就是为了实现特定运动而被精心设计的。那么,什么是机器人运动学?机器人运动学是研究机器人各组成构件运动变换关系及运动特征参数的一门学科,它反映了机器人的运动...
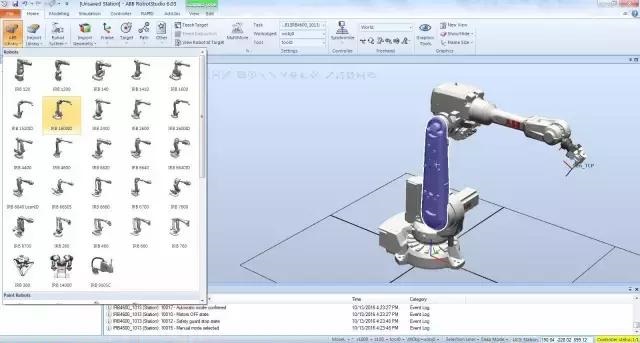
RobotStudio是ABB机器人专属的离线编程与仿真调试软件。你是否曾听说过RobotStudio这个软件呢?今天就来简要介绍一下这款ABB机器人的专属强大软件! 1.RobotStudio支持所有ABB机器人模型以及变位机、导轨等。 ...

我究竟应该先学哪种编程语言?这是一个许多新入行的机器人工程师在他们职业生涯中至少会问一次的问题。世界上有1500多种编程语言,都要学的话是太多了。目前,在机器人学中有10种最流行的编程语言。对于机器人学,...

机器人的分类是学习机器人技术之前必须了解的基本问题之一。机器人是个庞大的家族,现有的机器人分类方法和规则林林总总、莫衷一是,并不能将所有的机器人囊括其中。为使大家对机器人的类型有一个全面、系统地...
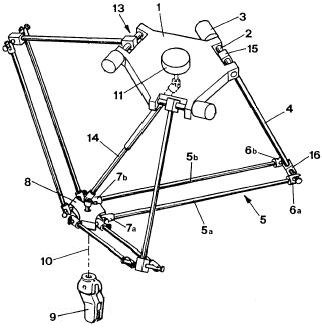
Delta并联机器人也称三角机器人,主要由驱动电机、主机械臂、副机械臂、固定平台、动平台、抓具等部件构成,其整体外形似三个倒挂的三角形,故此得名。 Delta机器人是典型的空间三自由度并联机械臂机构,因...
1. 什么是工业机器人TCP? 为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF来完整描述该刚体的位姿。对于工业机器人,需要在末端法盘...
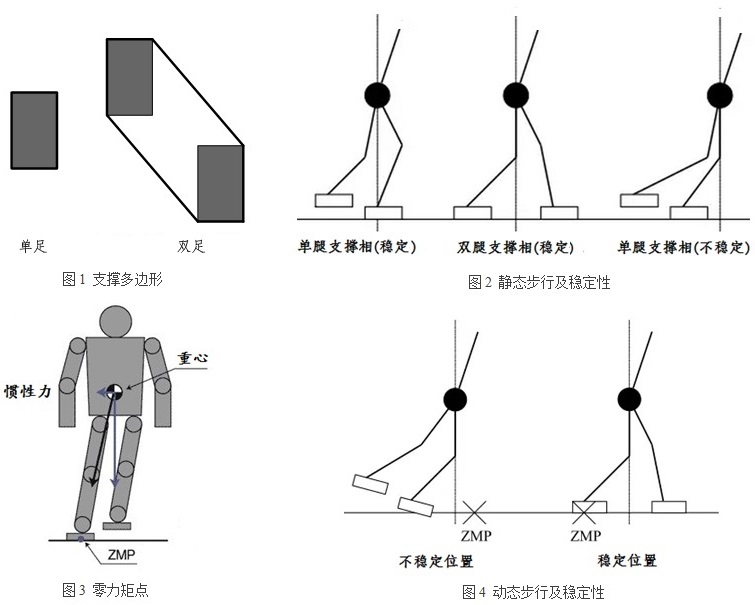
双足机器人为什么能像人一样稳定地行走,这里面又蕴含着怎样的科学原理呢?我们按机器人行走速度的不同分为两种情况考虑: 当机器人慢速行走时(比如步速10秒/步甚至更长),机器人系统的惯性是可以忽略不计的,...