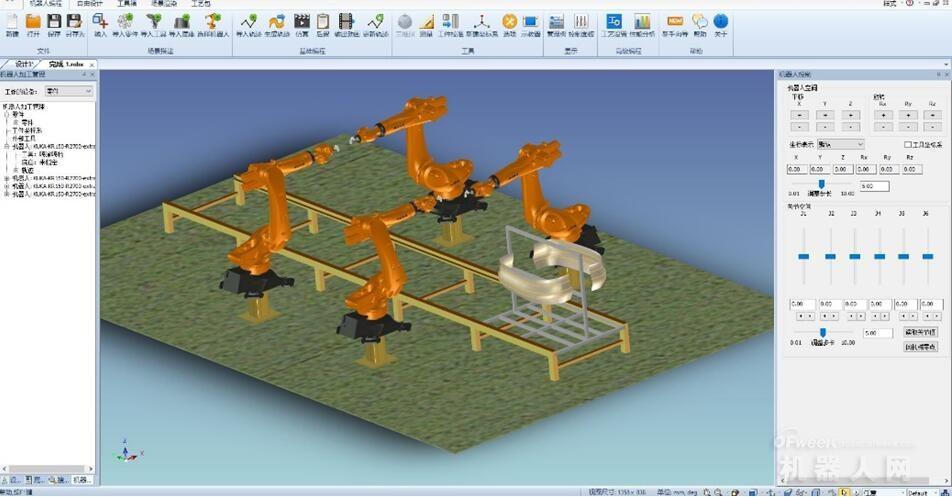
通常来讲,机器人编程可分为示教在线编程和离线编程两种。示教编程一般用于入门级应用,如搬运、点焊等,对于复杂应用,示教编程在实际应用中主要存在以下问题: 1、示教在线编程过程繁琐、效率低。 2、精...

科技
54 条更新
通常来讲,机器人编程可分为示教在线编程和离线编程两种。示教编程一般用于入门级应用,如搬运、点焊等,对于复杂应用,示教编程在实际应用中主要存在以下问题: 1、示教在线编程过程繁琐、效率低。 2、精...
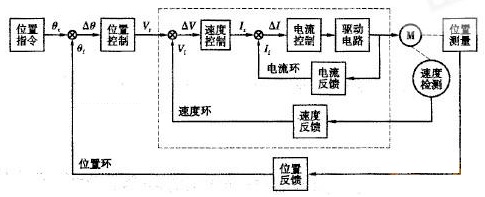
伺服电机有转矩、位置、速度三种控制方式,以下分别介绍: 1. 转矩控制。转矩控制方式是通过外部模拟量的输入或直接的地址赋值来设定电机轴对外输出转矩的大小。例如,若10V对应5Nm的话,当外部模拟量设定为5V...
单片机现在可谓是铺天盖地,种类繁多,让开发者们应接不暇,发展也是相当的迅速,从上世纪80年代,由当时的4位8位发展到现在的各种高速单片机。各个厂商们也在速度、内存、功能上此起彼伏,参差不齐。同时涌现出...

机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作,例如生产业、建筑业,或是危险的工作。...